
Der Reihenschlussmotor und der Asynchronmotor sind heutig gängige Elektromotoren.
Mixer, Waschmaschine, Rasenmäher, Videorekorder, Computer, Waschmaschine oder Geschirrspülmaschine: Ein Reihenschlussmotor steckt in vielen Haushaltsgeräten und elektrischen Handgeräten wie der Bohrmaschine oder der Säge. Er wird auch Hauptschlussmotor oder Universalmotor genannt. Doch ist der Reihenschlussmotor ein vergleichsweise schwacher Motor. Steigt die Last, nimmt die Drehzahl ab. Für die Industrie taugt er nicht.
Der Asynchronmotor ist dagegen ein leistungsstarker Motor, der Industriemaschinen aller Art antreibt.
Das Grundprinzip aber aller Elektromotoren ist immer dasselbe.
Der Elektromotor
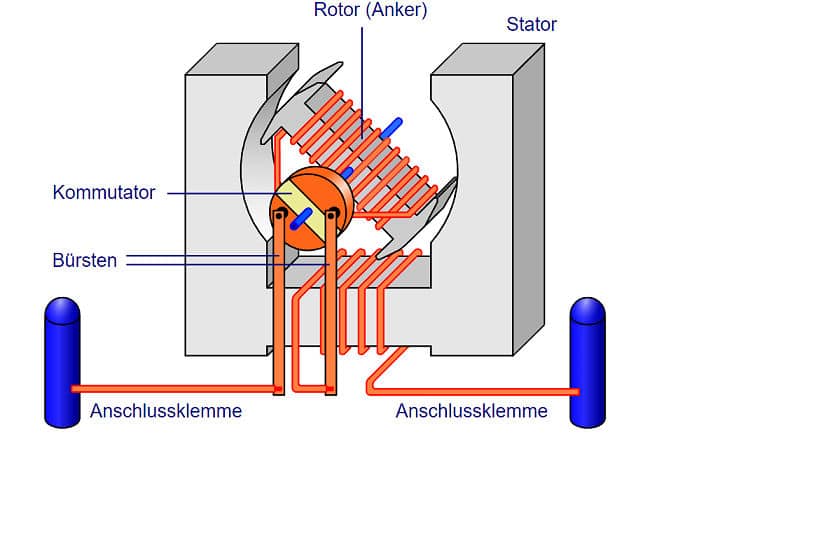
Stator, Rotor und Polwender sind die drei Bestandteile der meisten Elektromotoren.
Der Stator ist fest mit dem Gehäuse verbunden und also unbeweglich. Auf einer Seite befindet sich der Nord-, auf der anderen Seite der Südpol.Er erzeugt ein Magnetfeld, in dem sich ein Rotor, ebenfalls ein Magnetfeld, drehen kann. Je nach Motor ist der Stator entweder ein Dauermagnet oder ein Elektromagnet.
Der Rotor (auch Anker genannt) befindet sich zwischen den Polen des Stators. Er sitzt auf der Achse des Motor, und ist deshalb beweglich. Er kann sich drehen und ist mit Kupferdraht umwickelt. Fließt Strom wird der Rotor zu einem Elektromagnet mit Nord- und Südpol.
Der Polwender sitzt auf dem Rotor und versorgt den Kupferdraht des Rotors mit Strom.
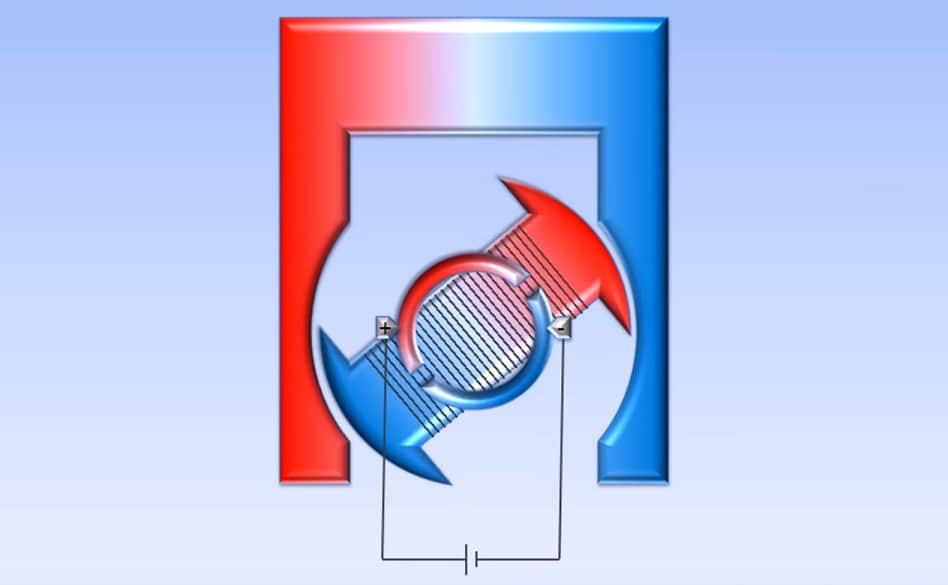
Wird der Rotor unter Strom gesetzt, wird er zu einem Elektromagneten und beginnt sich zu drehen. Nach einer halben Drehung wird der Rotor durch den den Polwender umgepolt. Mit jeder halben Umdrehung wechseln die Pole von Plus zu Minus und zurück.
Die Drehung des Rotors wird also erzeugt, indem sich ein wechselndes Magnetfeld in einem konstanten Magnetfeld ausrichtet. Auf dieser Wechselwirkung beruhen die Funktionsweisen fast aller Elektromotoren.
Arten von Elektromotoren
Man kann Elektromotoren nach Gleichstrommotoren und Drehstrommotoren unterscheiden. Gleichstrommotoren funktionieren nach dem hier oben beschriebenen Prinzip.
Man kann sie in elektrisch erregte und in permanent erregte Gleichstrommotoren unterscheiden. Das hängt davon ab, ob der Stator ein Dauermagnet oder ein elektrischer Magnet ist.
Drehstrommotoren haben einen ähnlichen Aufbau wie Gleichstrommotoren. Aber der Stator besteht aus drei im Dreieck angeordneten Spulen. Der Drehstrom meint alsodrei Wechselströme, die um 120° phasenverschoben sind.
Und auch Drehstrommotoren werden noch mal unterschieden – je nachdem ob sie synchron oder asynchron laufen.
Der Reihenschlussmotor
Der Reihenschlussmotor gehört zu den elektrisch erregten Gleichstrommotoren. Die Besonderheit des Reihenschlussmotors besteht in der Reihenschaltung seiner Anker- und Statorwicklung. Steht der Stator unter Strom, stoßen sich die beiden Magnetfelder ab.
Der Anker beginnt sich aufgrund dieser Abstoßung zu drehen. Nach jeder halben Umdrehung des Ankers wird durch den Kommutator die Stromrichtung umgekehrt, wodurch eine kontinuierliche Rotation des Ankers entsteht. Der große Vorteil des Reihenschlussmotors besteht darin, dass er sich sowohl mit Gleich- als auch mit Wechselstrom betreiben lässt.
Der Wechselstrom aus der Steckdose mit seiner Frequenz von 50 Hertz wechselt in jeder Sekunde 50 mal seine Richtung. Da dieser Wechsel jedoch gleichzeitig in Stator- und Ankerwicklung geschieht, entsteht trotzdem eine kontinuierliche Ankerrotation. Der Reihenschlussmotor hat eine weiche Kennlinie. Bei einem hohen Lastmoment fällt die Drehzahl stark ab.
Nebenschlussmotoren
Auch der Nebenschlussmotor gehört zu den elektrisch erregten Gleichstrommotoren. Beim Nebenschlussmotor sind Stator- und Ankerwicklung parallel geschaltet. Zwischen Ankerwicklung und Stromzufuhr ist noch ein veränderlicher Schiebewiderstand geschaltet, mit welchem die Motordrehzahl geregelt werden kann.
Der Nebenschlussmotor wird mit Gleichstrom betrieben. Anker- und Erregerstrom werden demselben Netz entnommen: Jedoch lässt sich der Ankerstrom durch den zwischengeschalteten Schiebewiderstand in seiner Größe begrenzen.
Dies ist besonders beim Anfahren des Nebenschlussmotors von Bedeutung, damit durch die Ankerwicklung beim Anfahren kein zu hoher Strom fließt. Der Nebenschlussmotor hat eine harte Kennlinie. Bei Steigerung des Lastmomentes fällt die Drehzahl nur geringfügig ab.
Doppelschlussmotoren
Der ebenfalls mit Gleichstrom betriebene Doppelschlussmotor hat zwei Erregerwicklungen, Eine der beiden Erregerwicklungen ist in Reihe, die andere parallel geschaltet. Der Doppelschlussmotor hat damit teilweise die Eigenschaften eines Reihenschlussmotors und teilweise die eines Nebenschlussmotors.
Dies bedeutet, dass die Kennlinie des Doppelschlussmotors zwischen der weichen Kennlinie des Reihenschlussmotors und der harten Kennlinie des Nebenschlussmotors liegt.
Asynchronmotoren
Asynchronmotoren können nur mit Drehstrom, also einem dreiphasigen Wechselstrom, betrieben werden. Die drei Phasen des Drehstromes sind jeweils um 120° am Umfang der Statorwicklung versetzt. Der Rotor ist mit kurzgeschlossenen Wicklungen ausgestattet.
Es entstehen durch die Frequenz des Wechselstroms von 50 Hertz in den Statorwicklungen veränderliche Magnetfelder, die ein umlaufendes Drehfeld erzeugen. Durch dieses Drehfeld werden in den kurzgeschlossenen Rotorwicklungen durch Induktion Spannungen erzeugt, die in den Rotorwicklungen einen Strom fließen lassen. Der Rotor beginnt sich in der gleichen Richtung des umlaufenden Drehfeldes zu drehen.
Beim Asynchronmotor ist weder ein Schleifring noch ein Polwechsler erforderlich, was sich sehr günstig auf dessen Verschleiß auswirkt. Asynchronmotoren haben ein breites Anwendungsfeld, besonders in Industrie und Handwerk.
Synchronmotoren
Ein Synchronmotor lässt sich entweder mit Einphasen-Wechselstrom oder mit Drehstrom betreiben.
Der Rotor eines Synchronmotors besteht bei kleineren Ausführungen aus starken Permanentmagneten aus Seltenerdmetallen. Bei größeren Ausführungen ist der Rotor mit Erregerwicklungen versehen, die über Schleifringe mit Strom versorgt werden.
Dadurch entsteht das Magnetfeld des Rotors nicht durch Induktion, wie beim Asynchronmotor, mit der Folge, dass der Rotor die gleiche Drehzahl annimmt, wie das umlaufende Drehfeld. Synchronmotoren haben einen sehr hohen Wirkungsgrad und eine ebenso hohe Leistungsdichte.
Der Reluktanzmotor
Beim Reluktanzmotor besteht der Rotor aus einem sehr gut magnetisierbaren Weicheisenkern, der zahnförmige Aussparungen hat. Der Rotor hat vier Pole, die sich paarweise gegenüberstehen. Der stillstehende Stator hat sechs mit Wicklungen versehene Pole, die gleichmäßig am Umfang verteilt sind. Wenn sich der Rotor dreht, stehen immer zwei um 180° versetzte Pole des Rotors und zwei um 180° versetzte Pole des Stators in einer diagonalen Flucht.
Bei Drehung des Rotors werden die Statorwicklungen nacheinander ein- und ausgeschaltet. Dadurch erhält der Rotor durch Abstoßung der Pole ein Drehmoment und wird in Rotation versetzt. Der Reluktanzmotor hat einen sehr einfachen und robusten Aufbau.
Fazit Reihenschlussmotor & Co
Ein breites Anwendungsspektrum in der Antriebstechnik wird durch den Reihenschlussmotor abgedeckt. Da er sowohl mit Gleich- als auch mit Wechselstrom betrieben werden kann, bezeichnet man den Reihenschlussmotor auch als Universalmotor. Man findet ihn als sehr praktischen Antrieb in vielen Haushaltsgeräten, wie Staubsauger, Küchenmaschine und Mixer.
Weitere Anwendungen des Reihenschlussmotors sind Handbohrmaschinen und andere elektrische Handgeräte. Jedes Kraftfahrzeug mit Verbrennungsmotor hat einen Reihenschlussmotor, der als Anlasser den Motor startet. Weitere Elektromotoren lassen sich auch unter nbe-online.de finden, mit einer Vielzahl an anderen Motoren.
Bildquellen:
© https://www.youtube.com/watch?v=glUcvuBfV9o
© Von Honina, CC BY-SA 3.0, commons.wikimedia.org/w/index.php?curid=2589806